 Zobacz pełną wielkość
Zobacz pełną wielkość
Edutop
Marynarska 44a/3
91-803 Łódź
email: biuro@edutop.pl
faks: 46 838 39 40
tel komórkowy: 603 927 527
Zobacz pełną wielkość
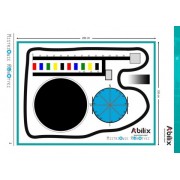
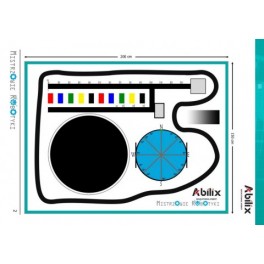
Wielozadaniowa mata edukacyjna do wykorzystania z robotami edukacyjnymi Abilix Krypton
stworzona przez grupę „Mistrzowie programowania”
1. Mata SUMO
Średnica pola walki — 80cm. Obwiednia biała.
Walka polega na spychaniu robotów o podobnych parametrach (liczba silników / waga / wykorzystane elementy konstrukcyjne itd.) poza teren maty przy jednoczesnym pozostaniu wygranego robota w jej obrębie.
2. Poruszaj się wewnątrz wyznaczonego obszaru
Możliwość wykorzystania z robotami serii Krypton posiadającymi czujnik koloru, bądź skali szarości skierowany w matę.
Robot porusza się wewnątrz czarnego pola w zaprogramowany sposób. W momencie kiedy czujnik wykryje linię graniczną, robot zatrzymuje się, wycofuje, obraca się i porusza się dalej po wy-znaczonym terenie.
3. Znajdź przedmioty i wywieź poza teren wyznaczonego obszaru.
Robot porusza się wewnątrz czarnego pola do czasu aż znajdzie szukany przedmiot. W momencie znalezienia przedmiotu wywozi go poza teren obszaru pozostając jednocześnie dalej w wyznaczonym polu.
4. Przejazd na określonej odległości
Lekcje programowania Abilix Krypton:
5. Przenieś obiekt do wyznaczonego pola
Rozszerzenie lekcji 2.1, 2.2.
Za pomocą robota serii Krypton przesuń obiekt w linii prostej z wybranego miejsca na linii do zaznaczonego pola
6. Zatrzymaj się przed przeszkodą
Rozszerzenie lekcji 7.3— Zachowaj dystans
Odległość mierzona od przeszkody— do 30 cm
Przedmiot wykrywany przez robota należy umieścić w kwadratowym polu funkcyjnym.
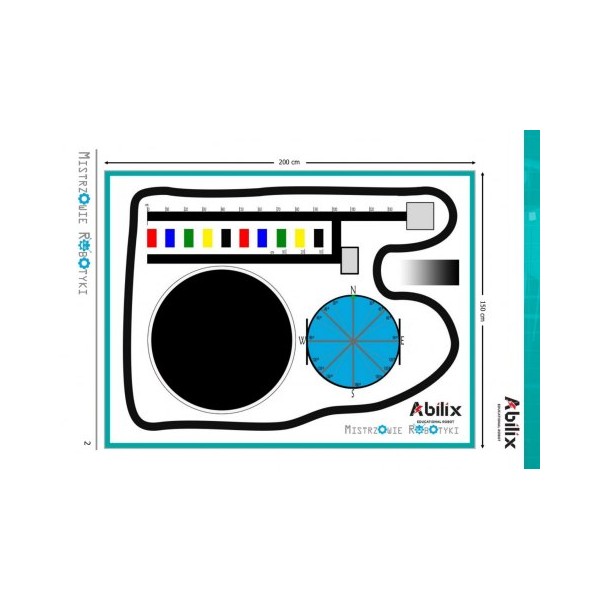
7. Skala odcieni szarości
Lekcje w podręczniku do nauki programowania
8. Zatrzymaj się kiedy czujnik wykryje określony kolor
Lekcje w podręczniku do nauki programowania:
9. Zatrzymaj się na drugiej, trzeciej linii danego ko-loru (bądź wykonaj akcję)
10. Line follower
Lekcje w podręczniku do nauki programowania:
Możliwość wybrania trasy—wewnętrznej lub zewnętrznej (dla jednego czujnika)
11. Rozpoznawanie kolorów
Lekcje w podręczniku do nauki programowania:
Do wykorzystania w wersji uproszczonej, podczas nauki korzystania z czujnika koloru, bądź wyko-rzystania dwóch robotów na jednej macie.
Robot po odczytaniu każdego z przedstawionych kolorów zatrzymuje się i wykonuje inne działa-nie programu wyznaczone dla danego odczytu koloru.
12. Obrót o daną wartość
Lekcje w podręczniku do nauki programowania:
Możliwość wykorzystania z robotami Abilix Krypton wykorzystującymi niezależne silniki do obrotu, wykorzystującymi enkodery do pomiaru obrotów silnika, bądź wspieranymi czujnikiem żyroskopowym. Wykorzystanie w programowaniu obrotu robota o dany kąt w prawo / lewo.
13. Wyznaczanie kierunków N, S, W, E
Możliwość wykorzystania z robotami Krypton 4, 6, 8 posiadającymi wbudowany kompas.
Do wykorzystania w programowaniu obrotu w konkretnym kierunku, w zależności od ustawienia maty względem położenia geograficznego.
14. Przejazd z wykorzystaniem obrotu o dany kąt.
Rozszerzenie lekcji:
Długość trasy — 50cm.
Do wykorzystania z programami typu „Jedź w przód, wykonaj obrót o np. 120 stopni w lewo, jedź w przód 20 cm, zatrzymaj się”
15. Przeciąganie liny
Rozszerzenie lekcji:
Roboty umieszczone są ok 10 cm. Za bocznymi czarnymi liniami. Środek liny (określony znacznikiem) znajduje się na linii środkowej. Na sygnał roboty przeciągają linę w swoją stronę.
Wygrywa robot, który jako pierwszy przesunie znacznik środka liny za czarną linię na swoim polu.


Drogi Użytkowniku, niniejszym informujemy Cię, że przetwarzamy Twoje dane osobowe. Zanim wejdziesz na naszą stronę, zapoznaj się proszę z poniższymi informacjami:
I. Administrator danych osobowych
Administratorem Twoich danych osobowych jest Sylwia Florek, prowadząca działalność gospodarczą pod firmą: EDUTOP - Sylwia Florek, wpisana do Centralnej Ewidencji i Informacji o Działalności Gospodarczej, NIP: 726 174 46 31, REGON: 100278229, tel./faks 46 838 39 40, tel. kom. 603 927 527, e-mail: biuro@edutop.pl.
II. Cele i podstawa prawna przetwarzania
Twoje dane osobowe w postaci adresu IP, danych zawartych w plikach cookies i danych lokalizacyjnych przetwarzamy w celu umożliwienia Ci wejścia na naszą stronę i przeglądania jej zawartości, na podstawie Twojej zgody – podstawa z art. 6 ust. 1 lit. a Rozporządzenia Parlamentu Europejskiego i Rady (UE) 2016/679 z 27.04.2016 r. w sprawie ochrony osób fizycznych w związku z przetwarzaniem danych osobowych i w sprawie swobodnego przepływu takich danych oraz uchylenia dyrektywy 95/46/WE (ogólne rozporządzenie o ochronie danych).
III. Odbiorcy danych
Twoje dane osobowe możemy udostępniać następującym podmiotom: firmom kurierskim, dostawcom, którzy realizują przesyłki i przetwarzają dane osobowe wyłącznie na polecenie Administratora. Takie podmioty przetwarzają dane na podstawie umowy z nami i tylko zgodnie z naszymi poleceniami. Nie przekazujemy Twoich danych poza teren Polski/UE/Europejskiego Obszaru Gospodarczego.
IV. Okres przechowywania danych
Twoje dane przechowujemy do czasu posiadania udzielonej przez Ciebie zgody.
V. Twoje prawa
Przysługuje Ci prawo dostępu do swoich danych oraz otrzymania ich kopii, prawo do sprostowania (poprawiania) swoich danych, prawo do usunięcia danych (jeżeli Twoim zdaniem nie ma podstaw do tego, abyśmy przetwarzali Twoje dane, możesz zażądać, abyśmy je usunęli), prawo do ograniczenia przetwarzania danych (możesz zażądać, abyśmy ograniczyli przetwarzanie Twoich danych osobowych wyłącznie do ich przechowywania lub wykonywania uzgodnionych z Tobą działań, jeżeli Twoim zdaniem mamy nieprawidłowe dane na Twój temat lub przetwarzamy je bezpodstawnie), prawo do wniesienia sprzeciwu wobec przetwarzania danych, prawo do przenoszenia danych, prawo do wniesienia skargi do organu nadzorczego (Prezesa Urzędu Ochrony Danych Osobowych, ul. Stawki 2, 00-193 Warszawa) oraz prawo do cofnięcia zgody na przetwarzanie danych osobowych (masz prawo cofnięcia zgody na przetwarzanie danych w dowolnym momencie; cofnięcie zgody nie ma wpływu na zgodność z prawem przetwarzania, którego dokonano na podstawie Twojej zgody przed jej cofnięciem).
W celu wykonania swoich praw skieruj żądanie pod adres email: biuro@edutop.pl, numer telefonu: 46 838 39 40; 603 927 527 lub udaj się do naszej siedziby.
VI. Informacja o dobrowolności podania danych
Podanie przez Ciebie danych jest dobrowolne. Jeżeli nie podasz danych, nie będziesz mógł przeglądać zawartości naszej strony.
VII. Zautomatyzowane podejmowanie decyzji
Na stronie Sklepu są wykorzystywane pliki cookies. Stosowane są one w celach zapewnienia maksymalnej wygody wszystkich użytkowników (w tym Kupujących) przy korzystaniu ze Sklepu (zapamiętywanie preferencji i ustawień na stronie, zbieranie anonimowych danych dla celów reklamowych i statystycznych, także przez inne portale, w tym portale społecznościowe, np. Facebook). Korzystanie ze Sklepu bez zmiany ustawień w przeglądarce dotyczących cookies oznacza, że będą one zamieszczane w urządzeniu końcowym każdego użytkownika. Jeżeli użytkownik nie wyraża zgody na stosowanie plików cookies powinien zmienić ustawienia swojej przeglądarki. Tu znajduje się więcej informacji o plikach cookies.